Sep 10 2024
Artificial Robotic Muscles
 By now we have all seen the impressive robot videos, such as the ones from Boston Dynamics, in which robots show incredible flexibility and agility. These are amazing, but I understand they are a bit like trick-shot videos – we are being shown the ones that worked, which may not represent a typical outcome. Current robot technology, however, is a bit like steam-punk – we are making the most out of an old technology, but that technology is inherently limiting.
By now we have all seen the impressive robot videos, such as the ones from Boston Dynamics, in which robots show incredible flexibility and agility. These are amazing, but I understand they are a bit like trick-shot videos – we are being shown the ones that worked, which may not represent a typical outcome. Current robot technology, however, is a bit like steam-punk – we are making the most out of an old technology, but that technology is inherently limiting.
The tech I am talking about is motor-driven actuators. An actuator is a device that converts energy into mechanical force, such a torque or displacement. This is a technology that is about 200 years old. While they get the job done, they have a couple of significant limitations. One is that they use a lot of energy, much of which is wasted as heat. This is important as we try to make battery-driven robots that are not tethered to a power cord. Dog-like and humanoid robots typically last 60-90 minutes on one charge. Current designs are also relatively hard, so that limits their interaction with the environment. They also depend heavily on sensors to read their environment.
By contrast we can think about biological systems. Muscles are much more energy efficient, are soft, can be incredibly precise, are silent, and contain some of their own feedback to augment control. Developing artificial robotic muscles that would perform similar to biological systems is now a goal of robotics research, but it is a very challenging problem to crack. Such a system would also need to contract slowly or quickly, and even produce bursts of speed (if, for example, you want your robot to jump). They would need to be able to produce a lot of power, enough for the robot to move itself and carry out whatever function it has. It would also need to be able to efficiently hold a position for long periods of times.
As a bonus, human muscles, for example, have stretch receptors in them which provide feedback to the control system which not only enhances control but allow for rapid reflexive movements. Biological systems are actually very sophisticated, which is not surprising given that they have had hundreds of millions of years to evolve. Reverse engineering such systems is no easy task.
Researchers, however, have made some preliminary progress. To start they need a material that can contract or stretch (or change its shape is some way) when a voltage is applied to it. That is the fundamental function of a muscle – they contract when activated by nerve stimulation. Muscles will also contract when an external electrical stimulus is applied to them. The musculoskeletal system is essentially a system of contracting muscles, arranged so as to move joints in different directions – the biceps flexes the elbow while the triceps extends the elbow, for example. But also there are often different muscles for the same action but with different positions of maximal mechanical advantage.
Designing such a system won’t be the challenge for engineers – thinking about such forces is bread and butter for engineers. The limiting factor right now is the material science, the artificial muscle itself. The other technological challenge (where we have already made good progress) is developing the various sensors that work together to provide all the necessary feedback. Humans, for example, use multiple sensory modalities at the same time. We use vision, of course, to see our environment and guild our movements. We also have proprioception which allows our brains to sense where our limbs are in three-dimensional space. This is why you can move accurately with your eyes closed (close your eyes and touch your nose – that’s proprioception). The vestibular system tells us how we are oriented with respect to gravity and senses any accelerating forces acting on us (such as spinning around). We also have tactile sensation so we can sense when we are touching something (our feet against the ground, or something in our hands). Our muscles can also sense when they are being stretched, which further helps coordinate movement.
Our brains process all of this information in real time, comparing them to each other to provide a unified sense of how we are oriented and how we are moving. Motion sickness, vertigo, and dizziness result when the various sensory streams do not all sync up, or if the brain is having difficulty processing it all.
Designing a robotic system that can do all this is challenging, but it starts with the artificial muscles. There are a few approaches in development. MIT researchers, for example, developed a fiber made of different materials with different thermal expansion properties. When stimulated the fiber coils, and therefore shortens. Muscles are made of many individual fibers that shorten when activated, so this could serve as the building block of a similar approach. The question is – will dozens or hundreds of these fibers work together to form a muscle?
More recently scientists have developed an electrohydraulic system – essentially bags of oil that contract or stretch when stimulated. Preliminary testing is promising, with a key feature that the system is energy efficient.
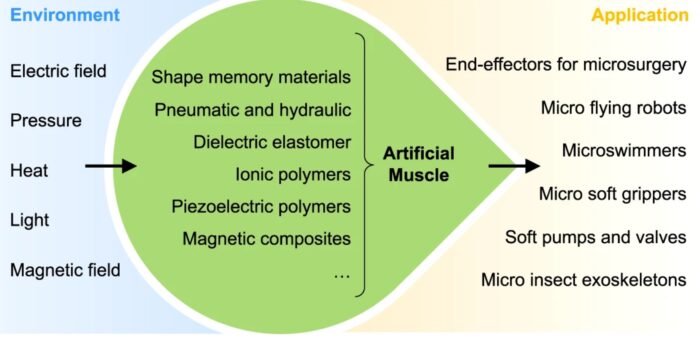
A recent Nature review breaks down the various artificial muscle systems by the environmental stimuli to which they respond: “According to different stimuli, artificial muscles can be categorized as thermoresponsive, electrically responsive, magnetically responsive, photoresponsive, chemically responsive, and pressure driven.” There are also multi-stimuli driven systems. They can also be categories by potential application. These include micro-robotic systems, where very tiny actuators are needed. Also there are biomedical applications, such as prosthetics and implantable devices. And of course there are robotic applications, but this is a huge category that includes many different sizes and designs of robots.
Most of this research has been essentially done in the last decade, so it is still very new. Interest and investment is increasing, however, as the potential of “microactuators” and “soft robotics” is better understood. This could potentially be a transformative technology, with lots of applications beyond just building more efficient and agile robots.