Apr 13 2023
Building A Robotic Hand
 Roboticists are often engaged in a process of reinventing the wheel – duplicating the function of biological bodies in rubber, metal, and plastic. This is a difficult task because biological organisms are often wondrous machines. The human hand, in particular, is a feat of evolutionary engineering.
Roboticists are often engaged in a process of reinventing the wheel – duplicating the function of biological bodies in rubber, metal, and plastic. This is a difficult task because biological organisms are often wondrous machines. The human hand, in particular, is a feat of evolutionary engineering.
Researchers at the University of Cambridge have designed a robotic hand that both reflects the challenge of this task and some of the principles that might help guide the development of this technology. One feature of this study struck me as significant because of how it reflects the actual function of the human hand, in a way not mentioned in the paper or press release. This made me wonder if the roboticists were even aware that they were replicating a known principle.
The phenomenon in question is called tenodesis (I did a search on the paper and could not find this term). I learned about this during my neurology residency when rotating in a rehab hospital. When you extend your wrist this pulls the tendons of the fingers tight and causes the fingers to flex into a weak grasp. For people with a spinal cord injury around the C6-7 level, they can extend their wrist but not grasp their fingers. So they can learn to exploit the tenodesis effect to have a functional grasp, which can make a huge difference to their independence.
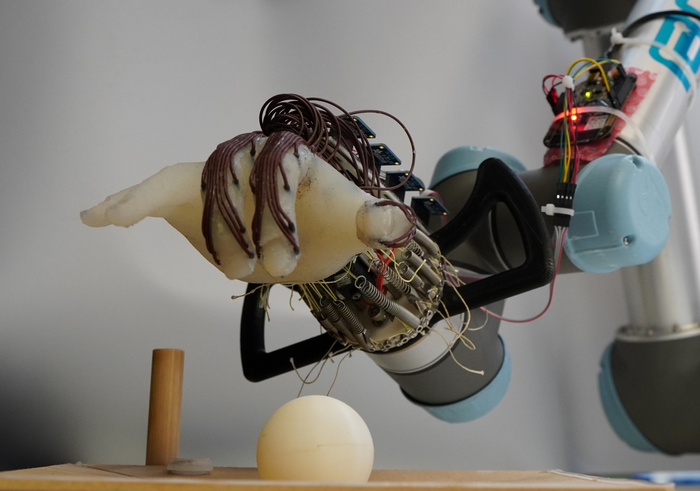
The Cambridge roboticists have apparently independently hit upon this same idea. They designed a robot hand that is anthropomorphic but where the fingers were not attached to actuators. The robot, however, could flex its wrist, which would passively cause the fingers to flex into a grasp – exactly as it happens in human hands with tenodesis. But why would roboticists want to make a robot hand with “paralyzed” fingers? The answer is – to optimize efficiency. Attaching all the fingers to actuators is a complex engineering feat and also using those actuators consumes a lot of energy. Passive grip is therefore much more energy efficient, which is a huge advantage in robotics.
The researchers still plan to guild out their robot hand with more functionality, giving the fingers independent movement. But when they do, they feel, it will be built on a design of maximal efficiency. This is a very evolutionary approach to robotics design. I have discussed this before in the context of robotics and AI. The course of evolution, by necessity (starting with maximal simplicity) but also because of efficiency, designs things from the bottom up. Take any structure, such as the human eye. The eye did not appear evolutionarily fully formed. Rather, it evolved through a number of stages from just an eye patch to a modern vertebrate eye, with each stage being fully functional. Each feature is developed and functional before new complexity is added. This does not always lead to optimal design because the bottom up approach can lock in features that work at a simple level but then become baggage for later more complex designs (the vertebrate eye, again, being a great example).
Human technology can also work in this way. Plows are simple but work, and the technology evolved through a number of stages until we get to modern tractors. Technological evolution sometimes also gets stuck with old features that are difficult to change (the layout of a modern keyboard, for example). But with technology there are more options than with biological evolution. You can redesign basic features if they no longer work. You can graft technologies developed for other purposes. The internal combustion engine was not designed specifically for plowing, but combined really well with a plow to make a tractor.
Evolution also loves efficiency. Organisms, living in a situation of intense competition for resources, tend to evolve maximal efficiency. I say “tend” because there are other factors at work as well. The peacock’s display is certainly not an efficient expenditure of energy, but is necessary for male reproduction, so it’s worth it.
In any case, designing robotic systems that function at a basic and simple level and then evolving complexity bit by bit seems like a good way to go. Passive functionality, like a tenodesis-like grip, is one such example. The robot hand in question also has a “skin” with sensors, so that the robot hand can sense how tightly it is gripping something. This allows it to keep from dropping objects, while not breaking them. This is something humans take for granted, but can be a difficult task for robots.
This approach – designing what is essentially a subsystem that works efficiently by itself – is also a great overall approach to robotics. The folks at Boston Dynamics, for example, have famously perfected robots that can walk. They did not do this by designing a super-intelligent robot that with something like conscious level control over its movements (like the human cortex). Rather it developed a walking algorithm that functions more like the brainstem – a primitive set of reflexes and algorithms that, added together, produce something akin to passive walking. When you are walking you are not thinking about every muscle contraction. You are not looking at the ground, thinking about the angle of your stance, and the force of your muscles. You just walk. It’s automatic, literally subconscious. Walking is a subsystem in the primitive (meaning old) part of your brain. Walking includes passive reflexes, ones that happen without the need for any higher level processing. There are stretch reflexes in the muscles, vestibular reflexes, ocular reflexes, and anti-gravity muscle tone. Balance requires cerebellar function (high level processing but still subconscious), and this is analogous to the walking software developed by Boston Dynamics.
What I think all this means is that roboticists have learned to take an evolutionary bottom-up approach to designing robots. They are working out how to accomplish specific tasks with maximal simplicity and efficiency. Those functions can then be combined or tricked out with added features, with the eventual goal of building a soft anthropomorphic robot with human-level functionality. But roboticists can do something evolution cannot – redesign core functions as needed to accommodate advanced functions. Evolution cannot fundamentally redesign the vertebrate eye because the basic structure is already baked into development biology and the genetic architecture. There is simply no evolutionary mechanism for something like that to happen. But roboticists can. Therefore, once human-level functionality is achieved there is every reason to think that it will be exceeded.
But there is a still a long way to go. The human body is still an incredible machine.